QRAC Toolbox and Research
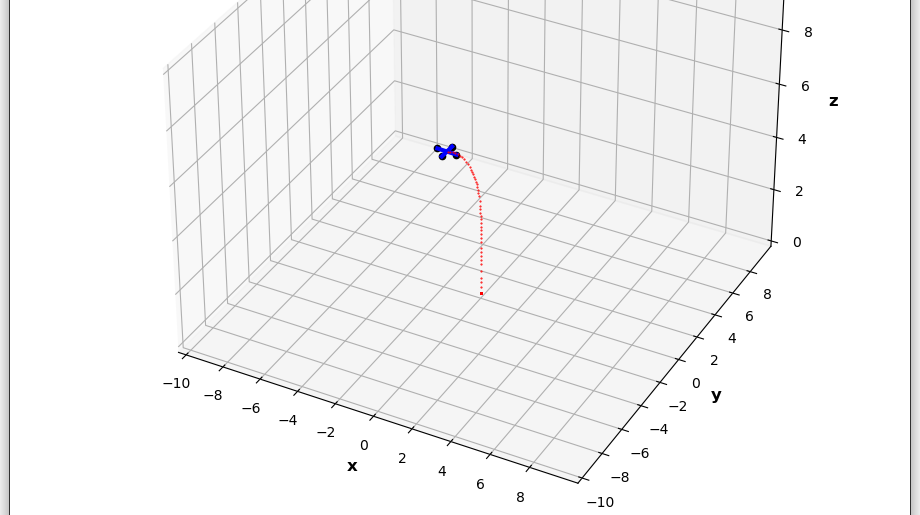
Under development. Python package containing lightweight simulator tools and implementations for quadrotor robust adaptive control.
Hi there! I'm a mechanical engineering student at UC Irvine. I firmly believe that any facet of problem solving—whether it be engineering, programming, or scientific research—can and should be used to change the world for the better. Although I love learning about different ways to improve people's lives through the various studies of engineering, medicine, urban planning, and more, my main interests lie in robotics and how we can design smarter machines to help more people. I have an emphasis on robotics, control theory, and motion planning, and I'm always eager to improve and apply my knowledge in these areas!
Under development. Python package containing lightweight simulator tools and implementations for quadrotor robust adaptive control.
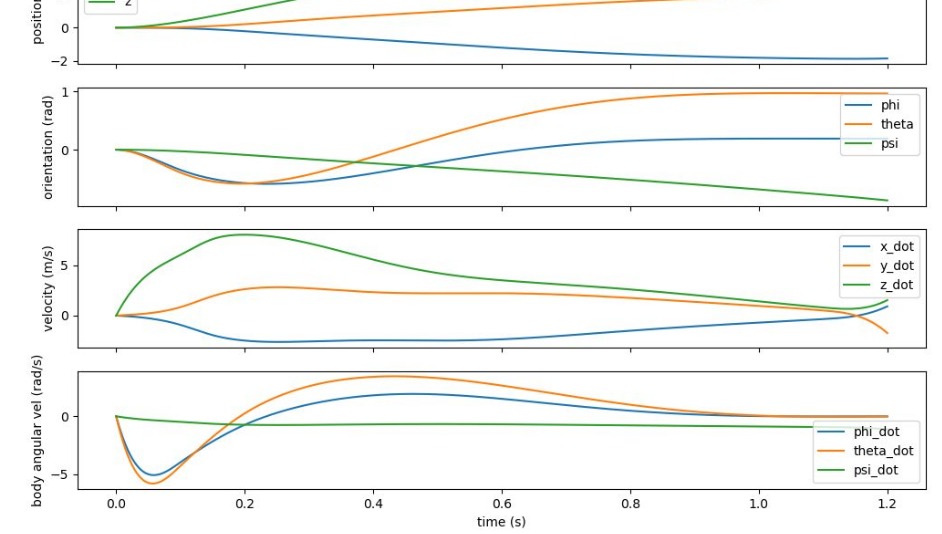
A real-time implementation of nonlinear model predictive control for quadcopter trajectory tracking.
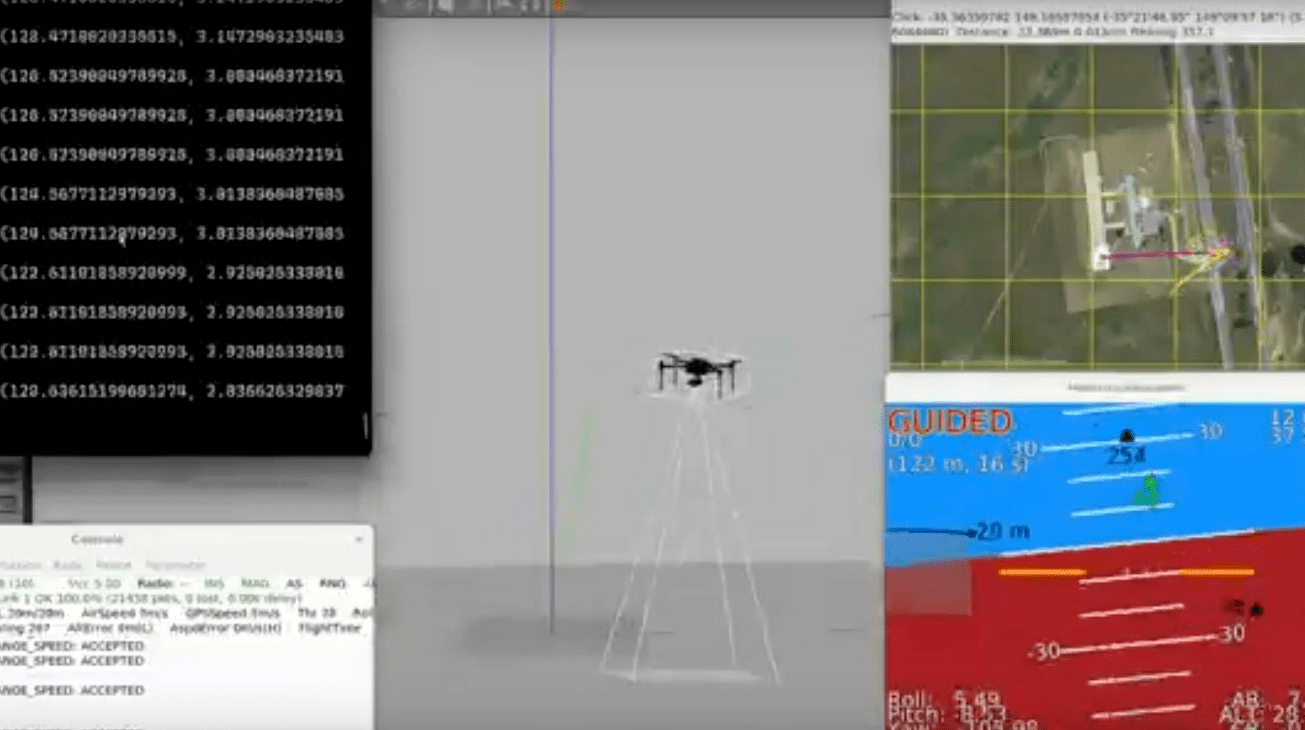
Online planner for ArduCopter and PX4 using MAVROS. Designed for the AUVSI SUAS competition.
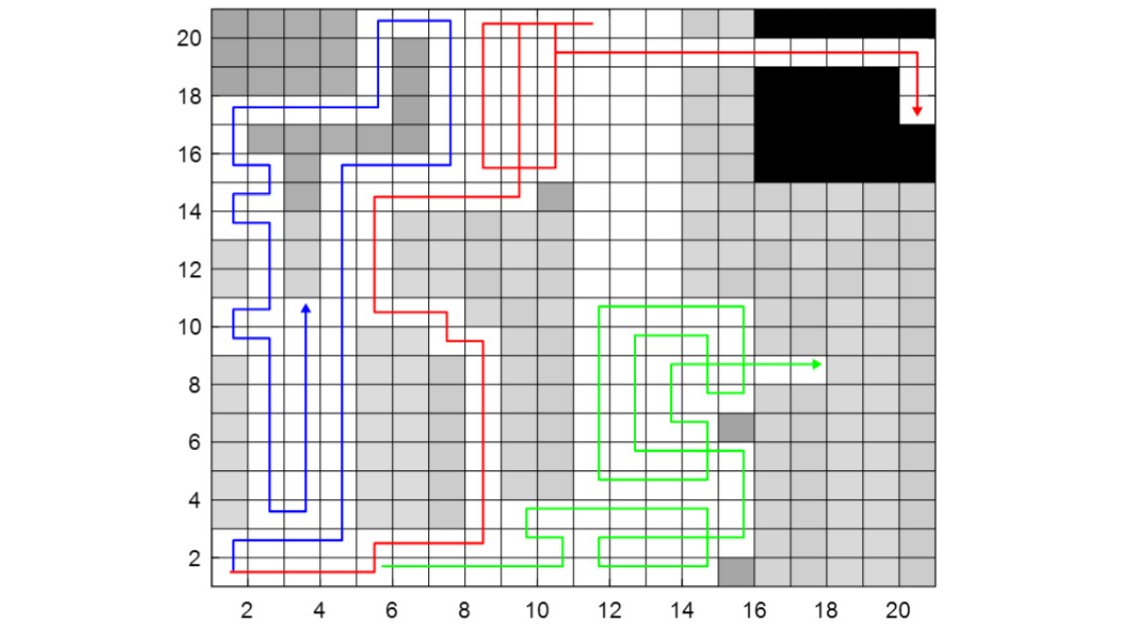
Software system combining ROS, OptiTrack, and discrete LQR to implement motion planning algorithms in real life. Still in the works.