QRAC Toolbox and Research
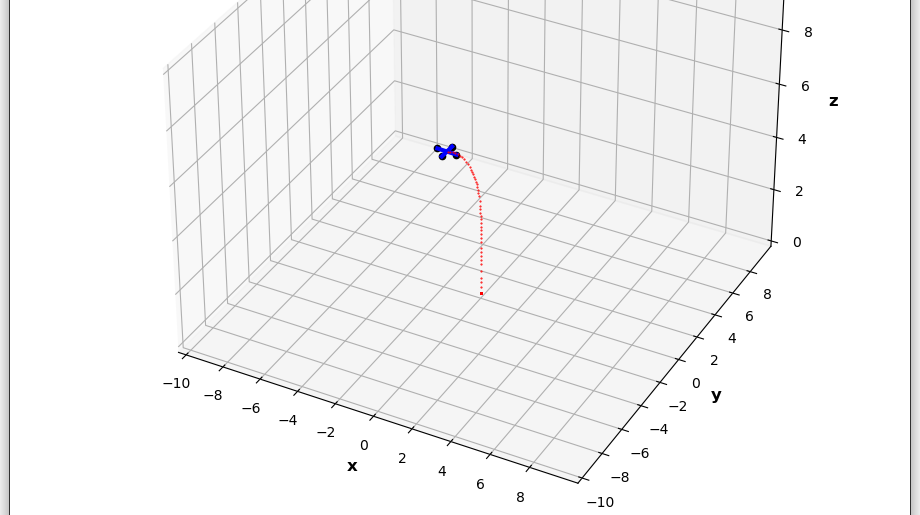
Under development. Python package containing lightweight simulator tools and implementations for quadrotor robust adaptive control.
Under development. Python package containing lightweight simulator tools and implementations for quadrotor robust adaptive control.
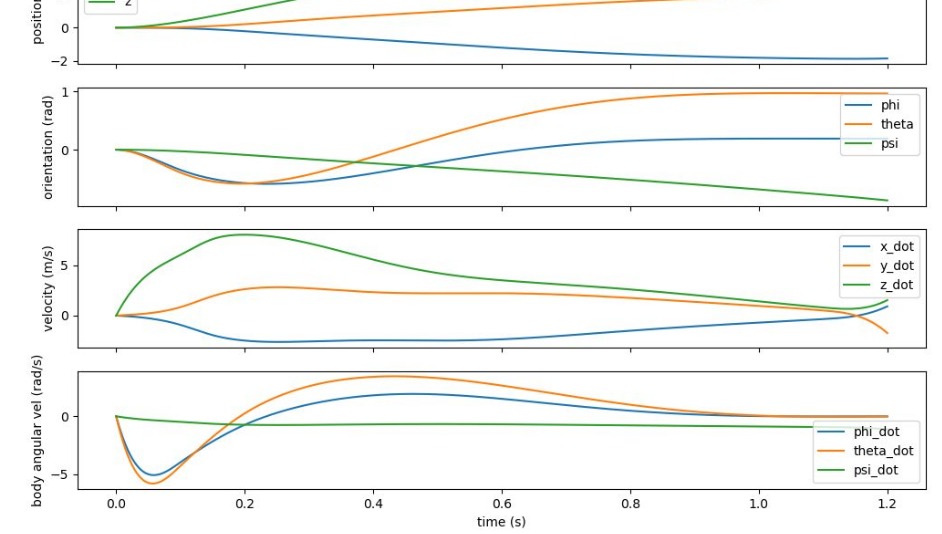
A real-time implementation of nonlinear model predictive control for quadcopter trajectory tracking.
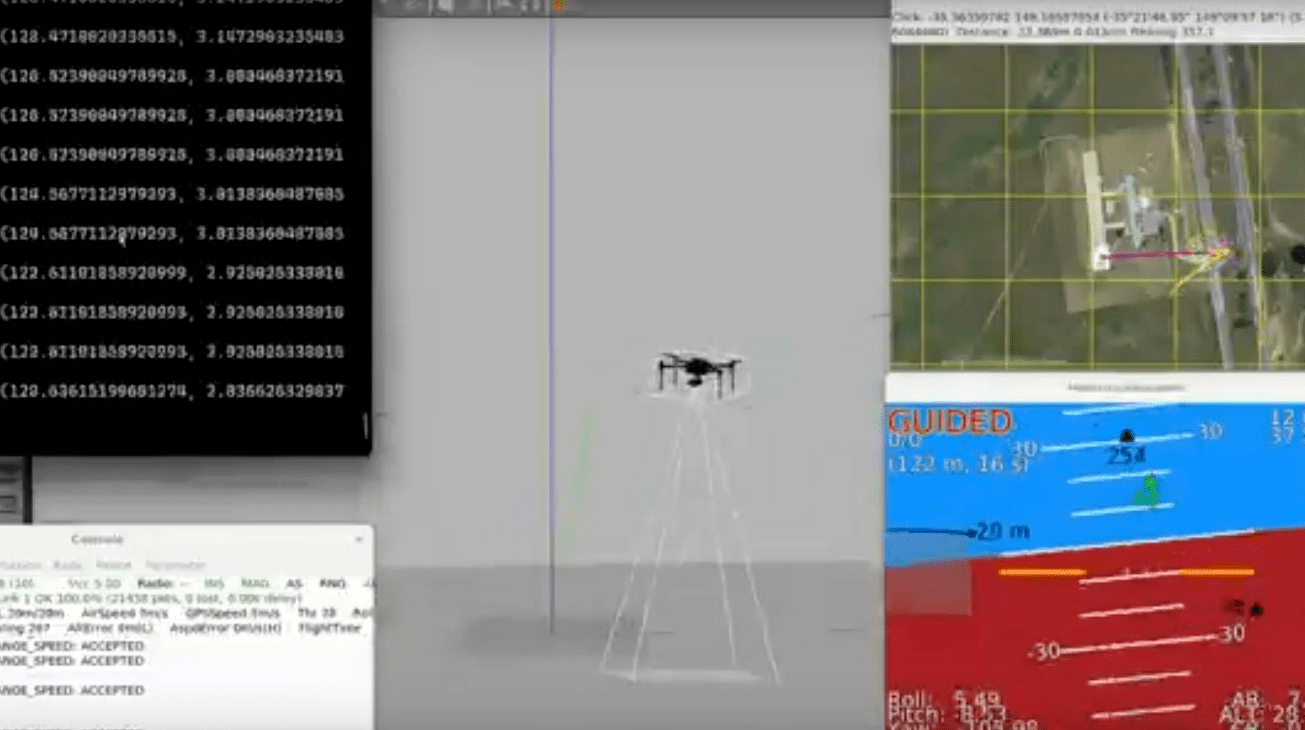
Online planner for ArduCopter and PX4 using MAVROS. Designed for the AUVSI SUAS competition.
Software system combining ROS, OptiTrack, and discrete LQR to implement motion planning algorithms in real life. Still in the works.
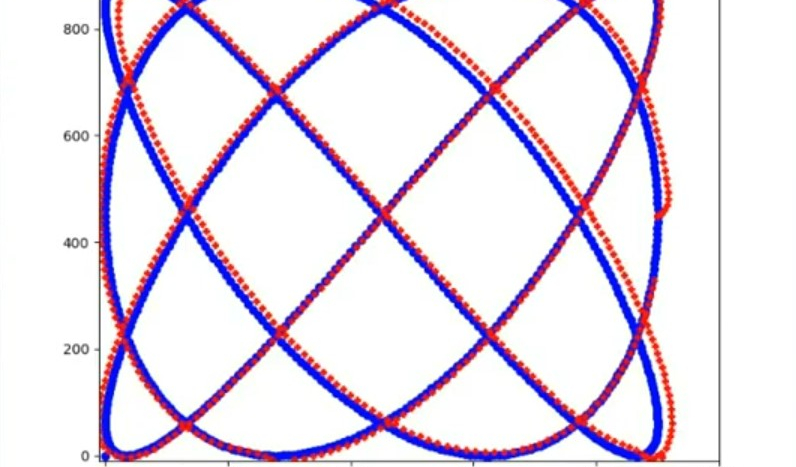
Discrete-time LQR for optimal differential drive trajectory tracking.
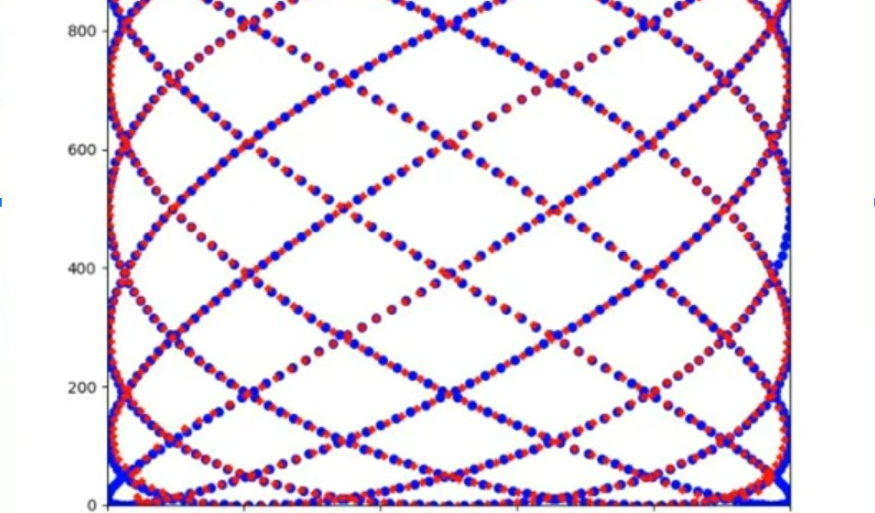
Discrete-time LQR combined with a PID for optimal mecanum drive trajectory tracking.
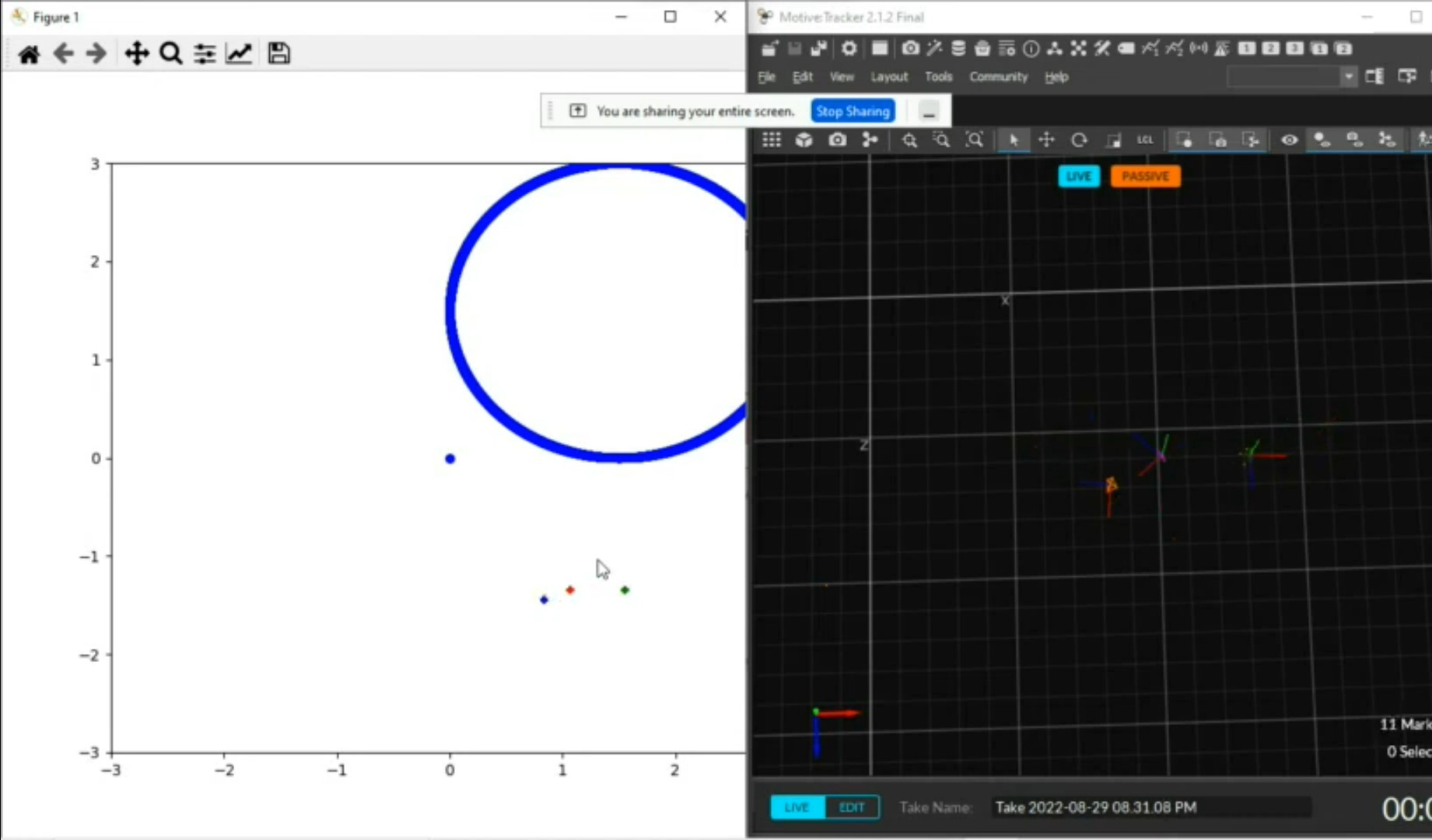
A ROS and Matplotlib interface for real-time, distributed localization.
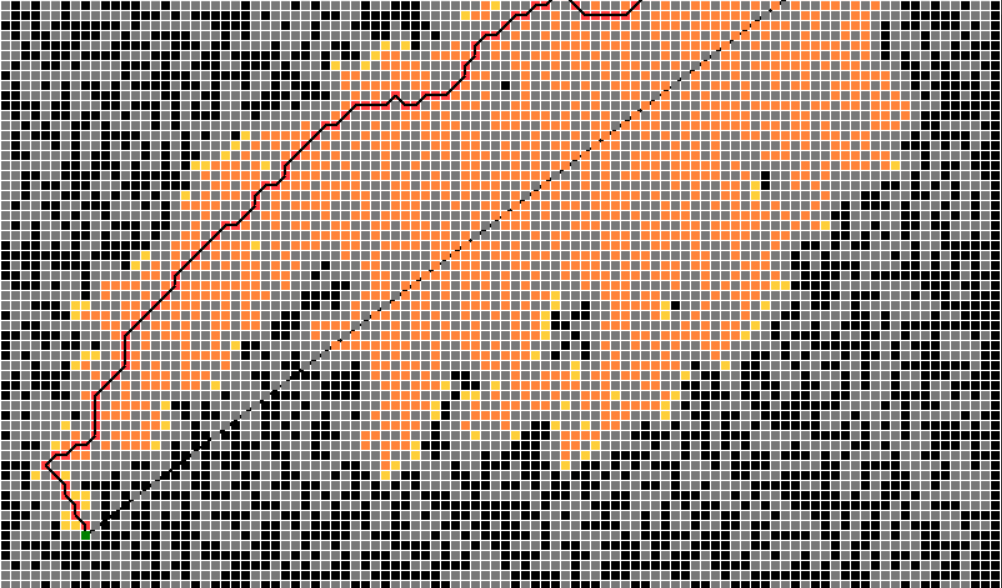
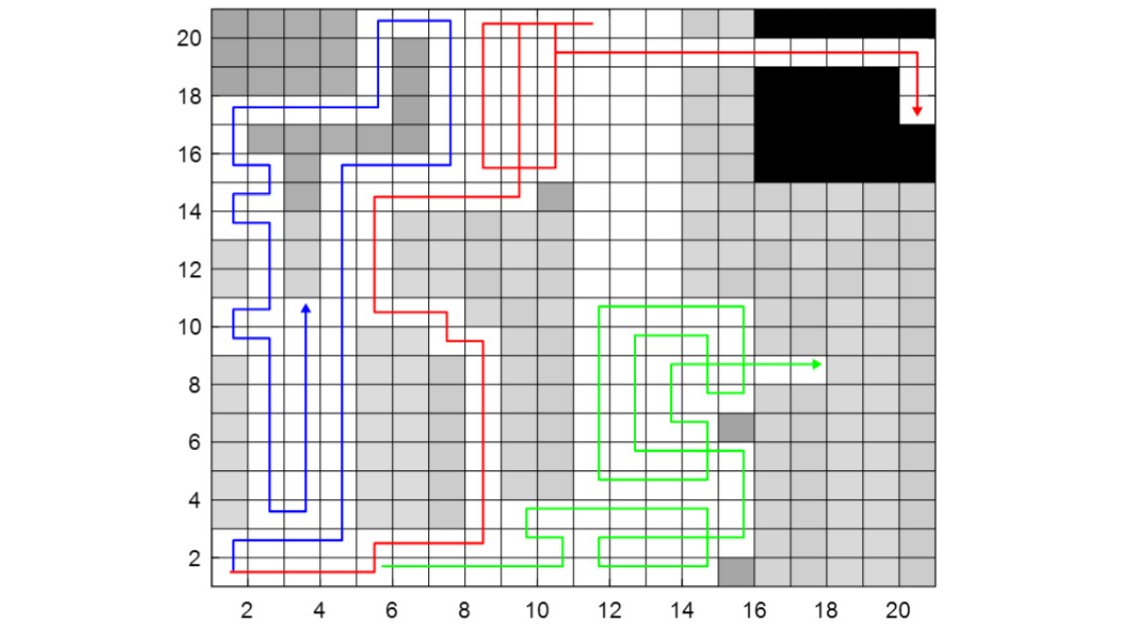
Implementation of A* for offline path planning in the AUVSI SUAS competition.
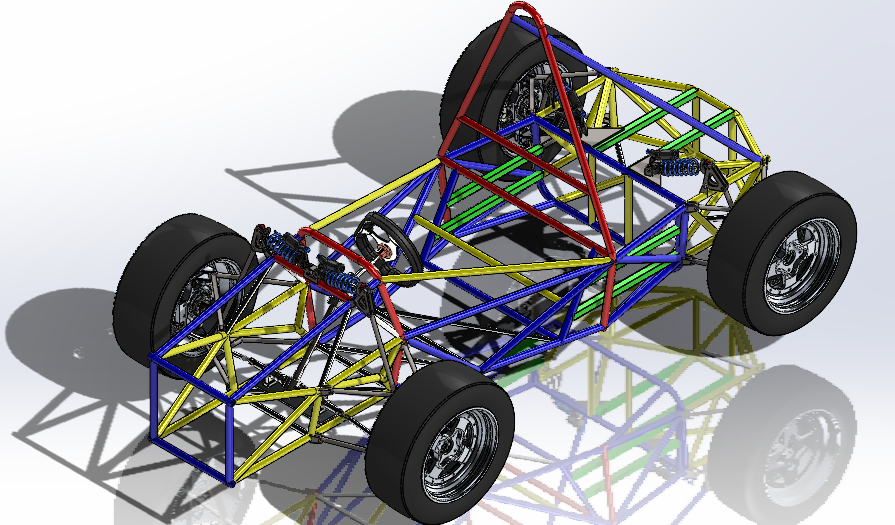
Compilation of design choices made to improve upon previous suspension systems.
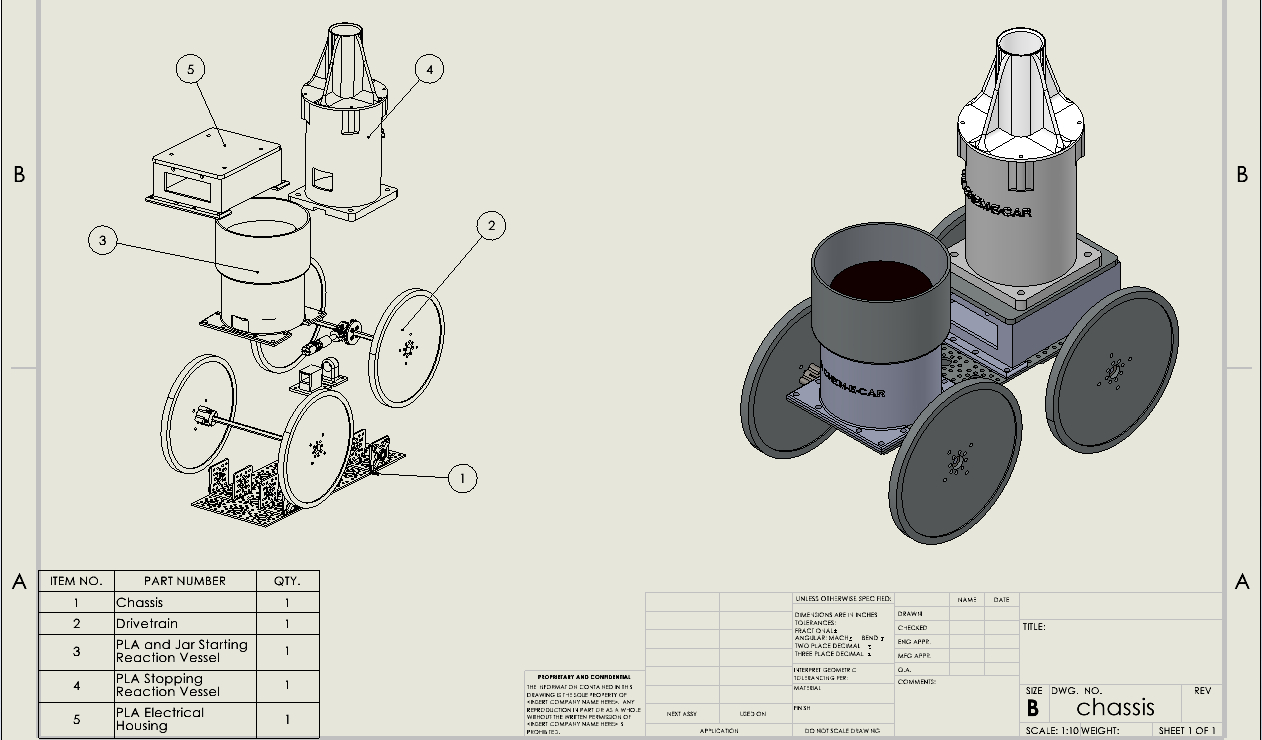
Display of chassis and design choices made to provide a reliable vehicle and platform for chemical reactions.